在今年的小鵬1024科技日上,這家科技出行公司再次以其前瞻性的視野和硬核的技術實力震撼了行業。如果說過去幾年,小鵬的焦點主要集中在智能汽車的迭代與進化上,那么今年的盛會,則清晰地勾勒出一個更為宏大的未來圖景——智能機器人,正成為小鵬“未來交通生態”拼圖中至關重要且極具顛覆性的一塊。其展示的研發成果,遠不止于簡單的產品發布,而是從核心能力、應用場景到未來愿景,提供了一個系統性的思考與實踐路徑。
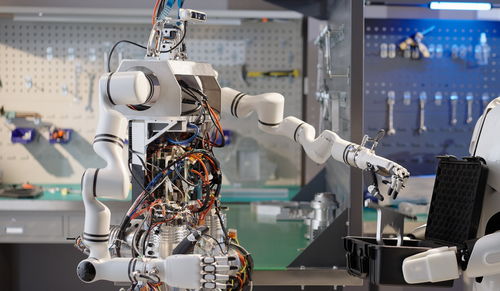
本次科技日最引人注目的硬核點之一,是智能機器人研發背后的核心驅動力——人工智能與先進硬件的深度融合。小鵬展示了其在感知、決策與執行三大層面的突破。在感知層面,機器人通過高精度多傳感器融合技術,能夠實現對復雜動態環境的實時、三維、全息理解,這與其在智能駕駛領域積累的感知能力一脈相承,并拓展至更廣泛的物理空間。在決策層面,基于深度學習和強化學習的“大腦”,賦予了機器人前所未有的自主任務規劃與動態應變能力,使其能在非結構化環境中自主導航、避障并執行復雜指令。在執行層面,小鵬展示了其在靈巧機械臂、高動態平衡、仿生關節等硬件領域的創新,確保機器人動作的精準、柔順與可靠。這三大能力的閉環,標志著其智能機器人研發已從概念驗證邁入高完成度的工程化階段。
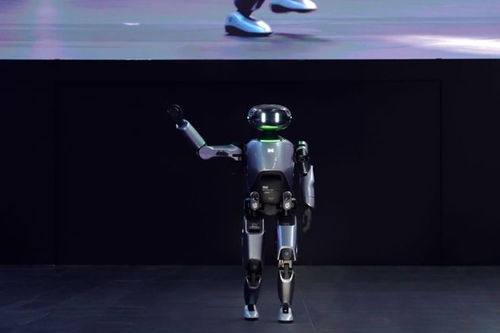
小鵬并未將智能機器人束之于實驗室的高閣,而是將其與具體的、貼近生活的應用場景緊密捆綁。科技日上,除了展示通用的人形機器人原型外,更側重于其在特定領域的“專精”應用。例如,面向家庭服務場景,機器人被賦予基礎的物品遞送、環境監控乃至簡單的互動陪伴能力;而在更廣闊的出行與公共服務領域,則探索了其在自動充電、停車場巡檢、物流末端配送等方面的潛力。這種“場景定義功能”的務實思路,使得小鵬的機器人研發具備了清晰的商業化路徑和解決實際痛點的價值,而非單純的技術炫技。它預示著,未來智能機器人將與智能汽車、飛行汽車等共同構成一個無縫銜接的立體交通與服務網絡。
更深層次的硬核之處,在于小鵬所揭示的技術協同與生態戰略。小鵬智能機器人的研發,絕非孤立進行。它深度共享了小鵬在智能電動汽車領域積累的“家底”:包括但不限于XNGP智能輔助駕駛系統的全棧自研算法、扶搖架構下的整車電子電氣架構與算力平臺、以及龐大的真實路況數據。這種跨領域的“技術復用”與“能力遷移”,極大地加速了機器人的研發進程,降低了試錯成本,并確保了技術底層的統一與高效。這背后,是小鵬致力于打造一個以“智能”為核心、多終端協同的“未來出行生態系統”的宏大野心。在這個系統里,智能汽車是移動的智能空間,飛行汽車拓展三維出行,而智能機器人則成為連接物理世界與數字世界、服務人與空間的靈活觸手。
今年小鵬1024科技日上關于智能機器人的硬核展示,其意義遠超單個產品的亮相。它是一次從技術深度、應用廣度到戰略高度的系統性宣告。小鵬正以其扎實的工程化能力和清晰的生態視野,將智能機器人從科幻電影中拉進現實,并堅定地將其塑造為未來智能出行生態中不可或缺的一環。這不僅是小鵬自身的一次重要進化,也為整個行業探索“科技如何更好地服務于人”這一終極命題,提供了極具參考價值的中國方案。未來的出行,將因這些“鋼鐵伙伴”的加入,而變得更加智能、便捷與充滿想象力。